

Kaspars
-
Posts
6 -
Joined
-
Last visited
Content Type
Profiles
Forums
Blogs
Gallery
Posts posted by Kaspars
-
-
Hello!
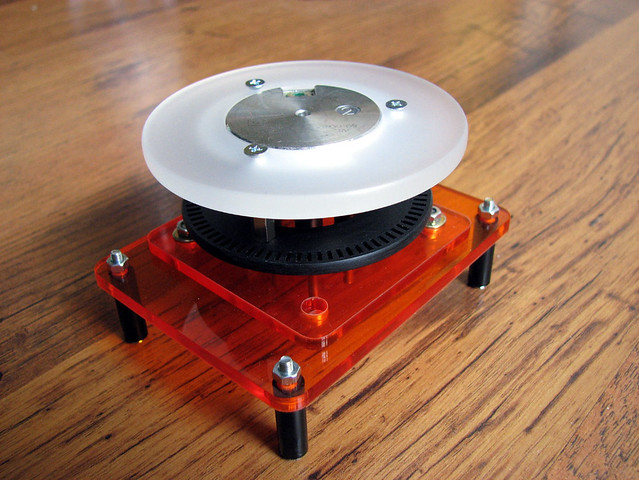
I recently bought CDJ1000 jog wheel assembly off ebay.
Interfaced it to my PIC18F452 as guided in this topic:
But resolution or should i say "sensitivity" is to high for cueing track like on real 12" or let`s just say dont feel like one.
I set encoder sensitivity in Traktor to 1% ! and even then it`s to sensitive because that jog has lots of steps per revolution.
Is there way to scale down this resolution using software divider?
I`m wondering maybe there is some way to utilize "MIOS Rotary Encoder Handler" for reading this encoder like regular one only without 1ms
limitation? It would be nice because it has that "MIOS_ENC_SPEED_SLOW" feature!
If i`m getting this right "MIOS Rotary Encoder Handler" reads only shift register pins defined in MIOS_ENC_TABLE
and as i understand only in intervals of 1ms or more because shift registers are read in intervals of 1ms.
But this is not limitation of handler itself and imho if i could somehow tell or trick MIOS_ENC_TABLE to treat PIC pins 23;24
as one encoder "MIOS Rotary Encoder Handler" will do the trick. Or not? ;)
Maybe some C guru has an idea?
-
FYI it can be done by using modifiers in Traktor software. I discovered that when modifier changes state Traktor sends out midi update of all changend LED`s. And i suspect that Pioneer`s controller update it`s LED`s same way.
-
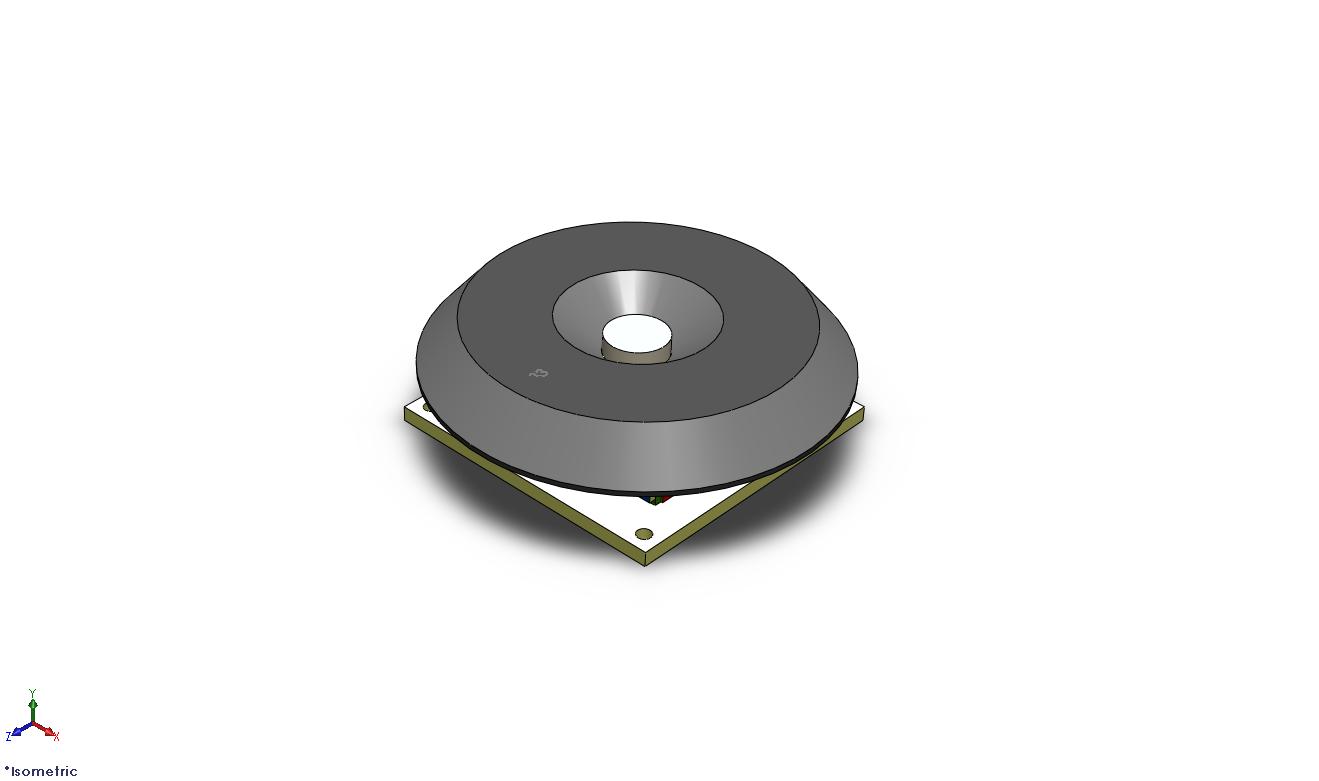
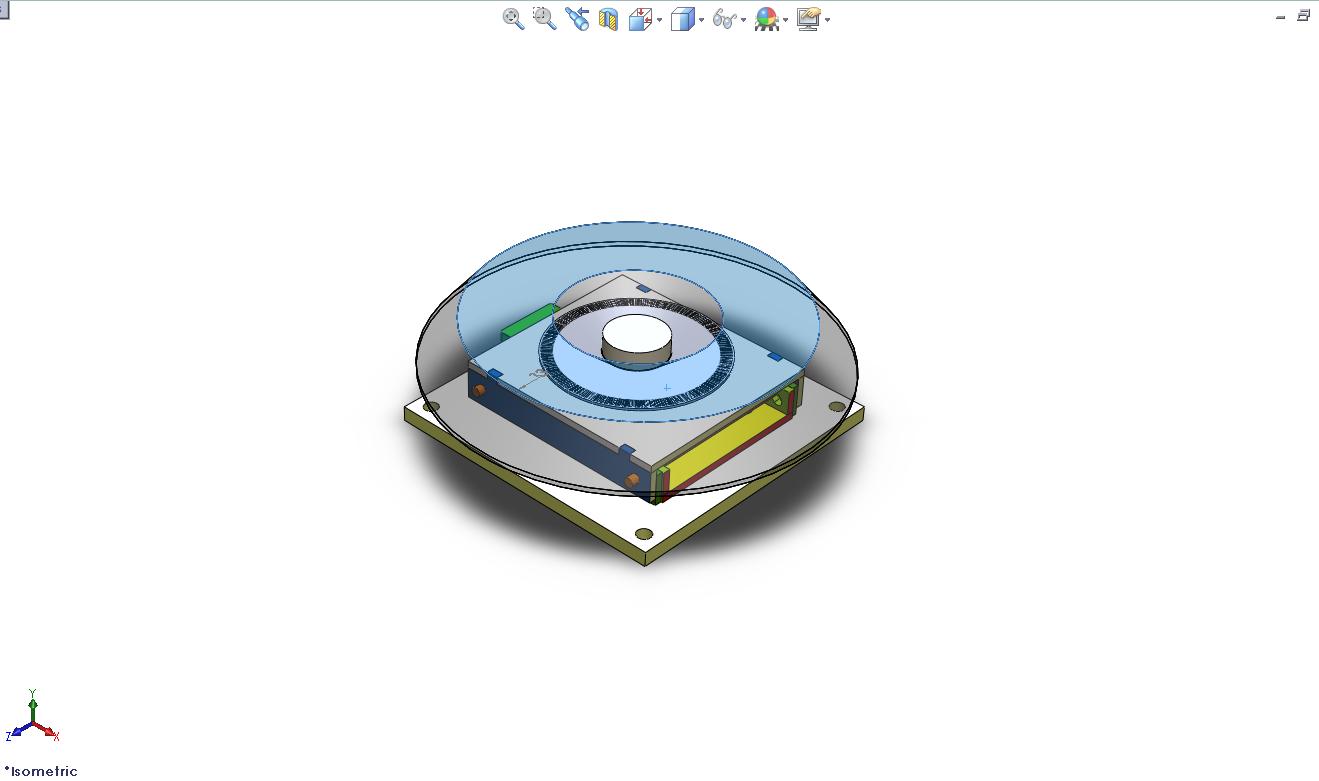
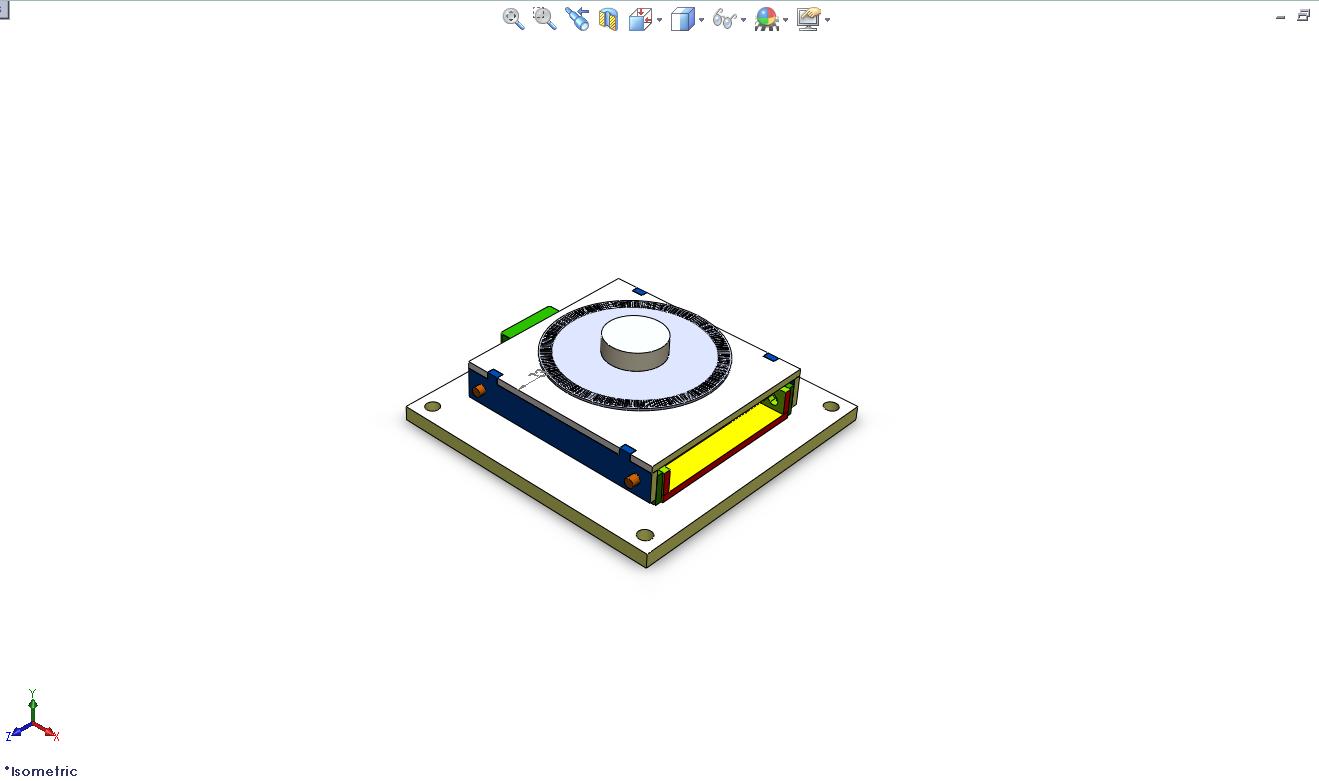
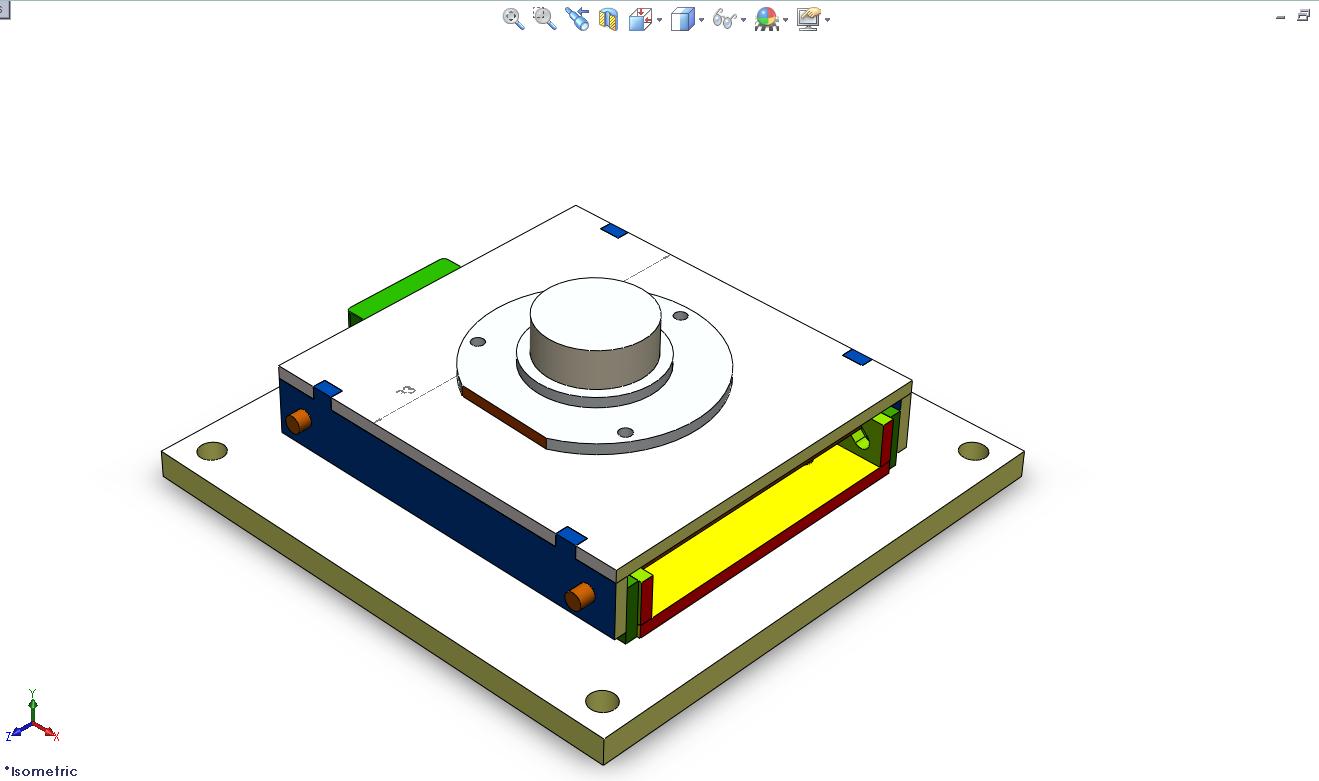
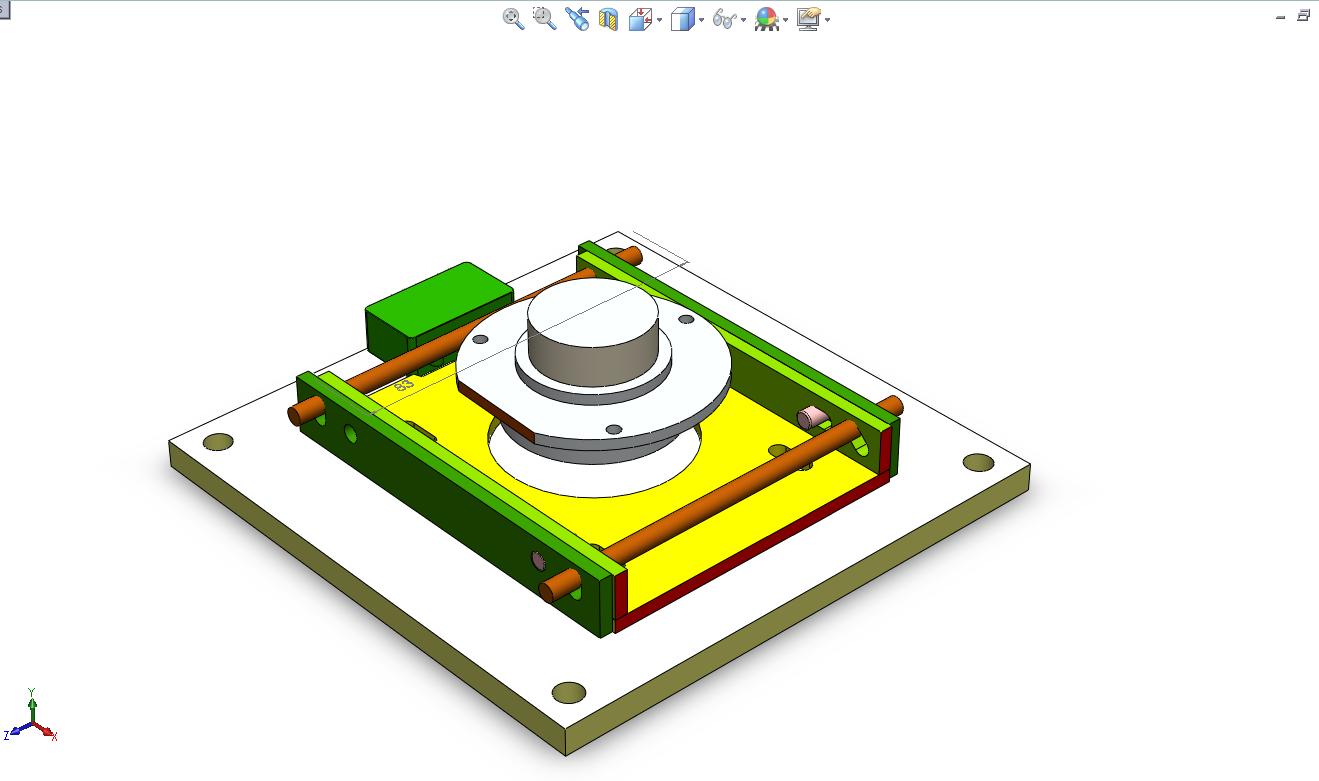
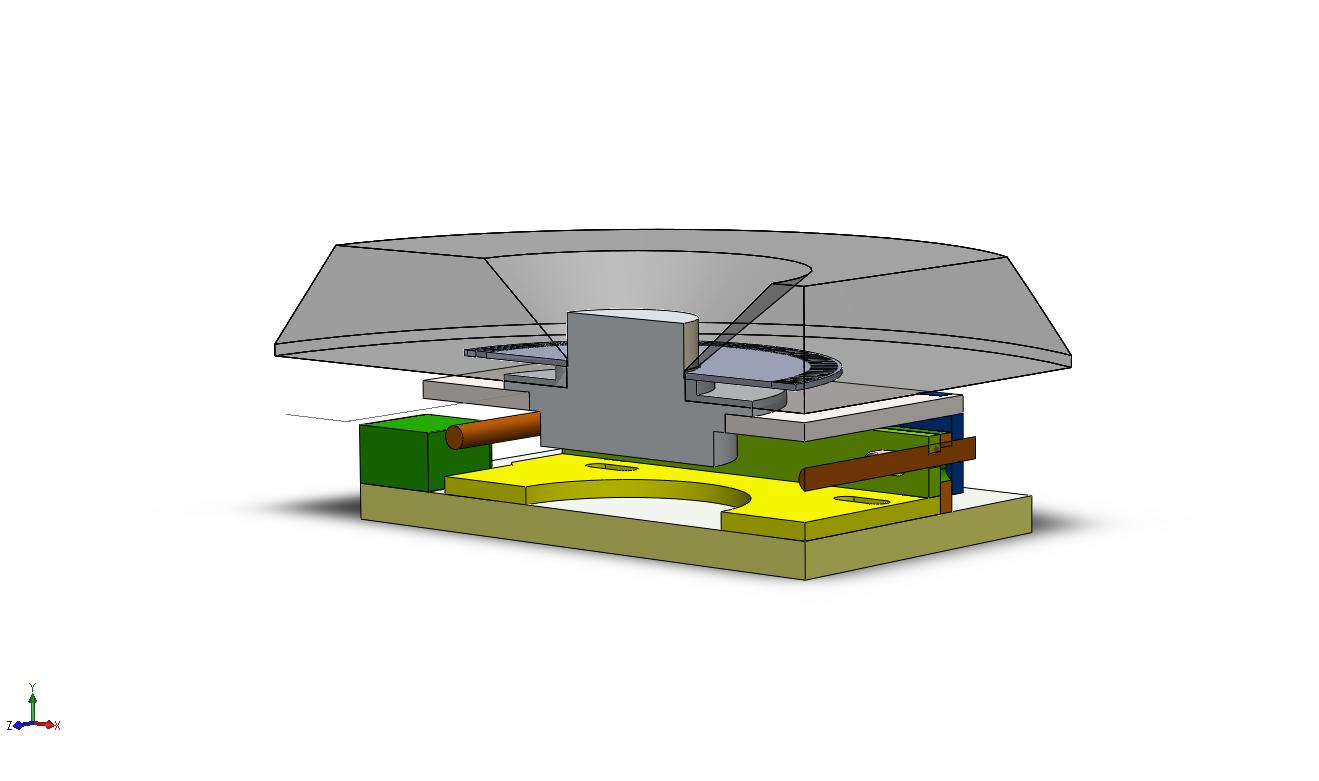
Maybe i`m stupid :) because maybe there is a better solution allready but anyway you are looking at
actuator for optical jog wheel with push function.
Inspired by this:
Bunch of tactile buttons will go underneath HDD motor so i don`t need to add any springs to
retract actuator back to starting point.





-
-
Hello!
I`m currently working on DIY copy of Pioneer DDJ-T1;
As base for my app i use ain64_din128_dout128_v2c which is
very straightforward and easy to understand by newbie like me
with little or nonexistent programming skills.
Everything is working fine - buttons, pots, encs and leds.
Shift button functionality taken from:
works too for AIN`s and DIN`s, but problem arises with DOUT so called "shifting" i will try to explain.
Original DDJ-T1 (and many other controllers) is 4 deck controllers
with 2 control sets used for all 4 deck control.
Switching of controller focus is done by means of "DECK" buttons.
So when i press DECK button controller shifts all inputs to different MIDI values/channels whatever and allso
it switches all leds to display status af that other deck.
And whats interesting that that`s done without Traktor sending any MIDI out to update DOUT`s to reflect other deck LED`s.
For example if deck A has LED1 active and deck B has LED2 active then switching between deck`s would cause LED1 go off and
LED2 go on and vice versa.
Is there any directions or code example that will provide this functionality?
I hope someone will understand my taught and came up with ideas.
CDJ1000 Jog wheel resolution scaling
in MIOS programming (C)
Posted
Hmm right now testing my version of jog wheel code without acceleration.
///////////////////////////////////////////////////////////////////////////// // Send HI RES ENCODER MIDI MESSAGE ///////////////////////////////////////////////////////////////////////////// if (!(oldsensordirection == 0 && sensordirection==0)){ MIOS_MIDI_TxBufferPut(0xb1); MIOS_MIDI_TxBufferPut(1 + shift); if (sensordirection > 0) { MIOS_MIDI_TxBufferPut(0x41); } if (sensordirection < 0) { MIOS_MIDI_TxBufferPut(0x3f); }Now it feels more natural :)